xmachine log
2026-02-09: Arbitration
The CPU is now properly designated as the bus arbitrator.
Probably in the future I should read the doc on the bus last and the doc on the processor first.
Also, my design for the bus can probably be simplified to a process that runs and accepts connections from devices. As the devices connect they could probably be entered into a queue and that would become the bus order.
The only thing sort of special is the connection to the CPU as the arbitrator.
2026-02-07: Weekend Update (Current State Revisited)
I wouldn't go so far as to say "everything is fixed", but libunibus is at least. Since everything kind of relies on that working, that would be why everything was broken previously.
My current criteria for things being fixed is by running:
$ ~/opt/pdp11-cross/bin/pdp11-aout-as asm/as/add.s -o local/add.as.aout
$ make all
$ bin/bus &
$ bin/mem -f local/add.as.aout &
$ bin/cpu
In English, assemble the add assembly example to aout. Run
make all, which builds bus, mem, and cpu (plus associated
libraries). Then start bus, mem, and cpu in the order specified.
cpu runs until its IR is zero, then halts.
So... yeah, killed a whole Saturday working on it, but I now kind of have a renewed enthusiasm for the project.
2026-02-04: Current State
The project has been dormant for a few months now. Mostly due to lack of time and the whims of the wheel of hobbies.
Also, everything is currently broken.
2025-11-21: Current State
The last two months have mostly been spent writing libunibus. That's
the Unibus driver and receiver stuff for devices. Bus communication
is written Rube Goldberg-style with each device having a priority bus and data
bus UNIX file socket.
Why? Well, it probably could have been done another way (and better),
but it seemed the easiest way to go for implementing the priority bus
at least to me. Devices, once they request bus master access, can block
(accept) or pass the grant from the bus arbitrator. That's how I ended up with
the implementation I have.
It kind of looks like this:
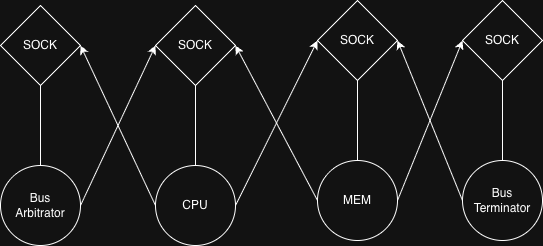
Each circle is a device (standalone program) and it has a UNIX file socket,
supporting datagrams, named /tmp/xmachine/<name>_pr.socket.
For example, the CPU needs bus master access to fetch a word from memory. To do that, you'd see the following activity on the priority bus:
CPU: Assert BR BA: Receive BR, Assert BG CPU: Receive and block BG, Assert SACK BA: Receive SACK, Negate BG CPU: Receive negated BG, Assert BBSY to the left (BA) and right (MEM) CPU now has control of the data bus.